车载摄像头是安装在车辆上的摄像装置,主要用于采集车辆周围环境的图像信息,为车辆的行驶和安全提供支持。传统汽车的车载摄像头只是指倒车影像用的摄像头,但随着近几年汽车的智能化和电动化的功能需要,车载摄像头开始提出各种新功能要求,而且应用领域也越来越广,例如从最开始的行车记录仪,再到现在的变道辅助、驻车辅助、智能驾驶、舱内监控等等。

北测光学实验室
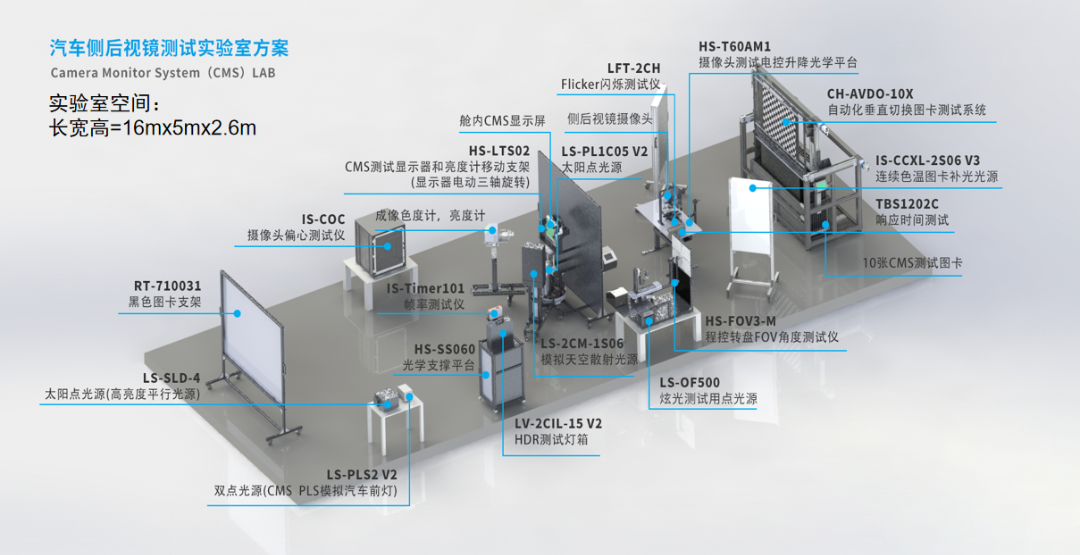
近年来,自动驾驶技术的迅速发展,车载摄像头成为自动驾驶感知系统的关键组成部分之一。用于捕捉周围环境的图像或视频数据。这些数据可以被自动驾驶系统处理,用来识别和检测道路标志、车道线、行人、车辆等物体,为自动驾驶的决策系统提供必要的信息。由于车载摄像头的重要性,为保障产品的质量,对其可靠性指标和光学性能指标的测试也变得非常重要。北测集团引入了全套的车载摄像头和汽车侧后视镜的测试能力,并按标准要求建立了光学实验室,全力为汽车的行驶安全保驾护航。
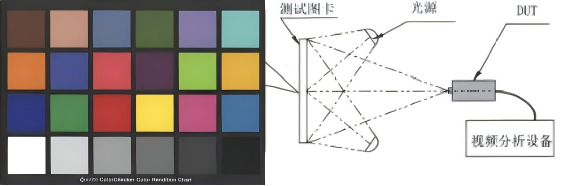
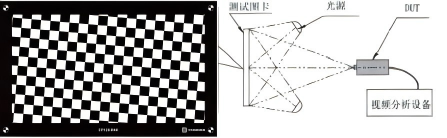
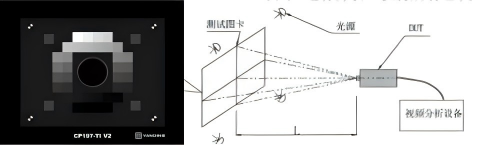
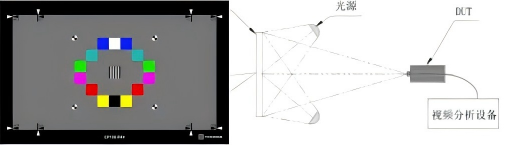
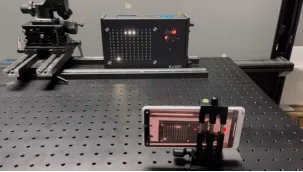
光学实验室的布置如下图所示:
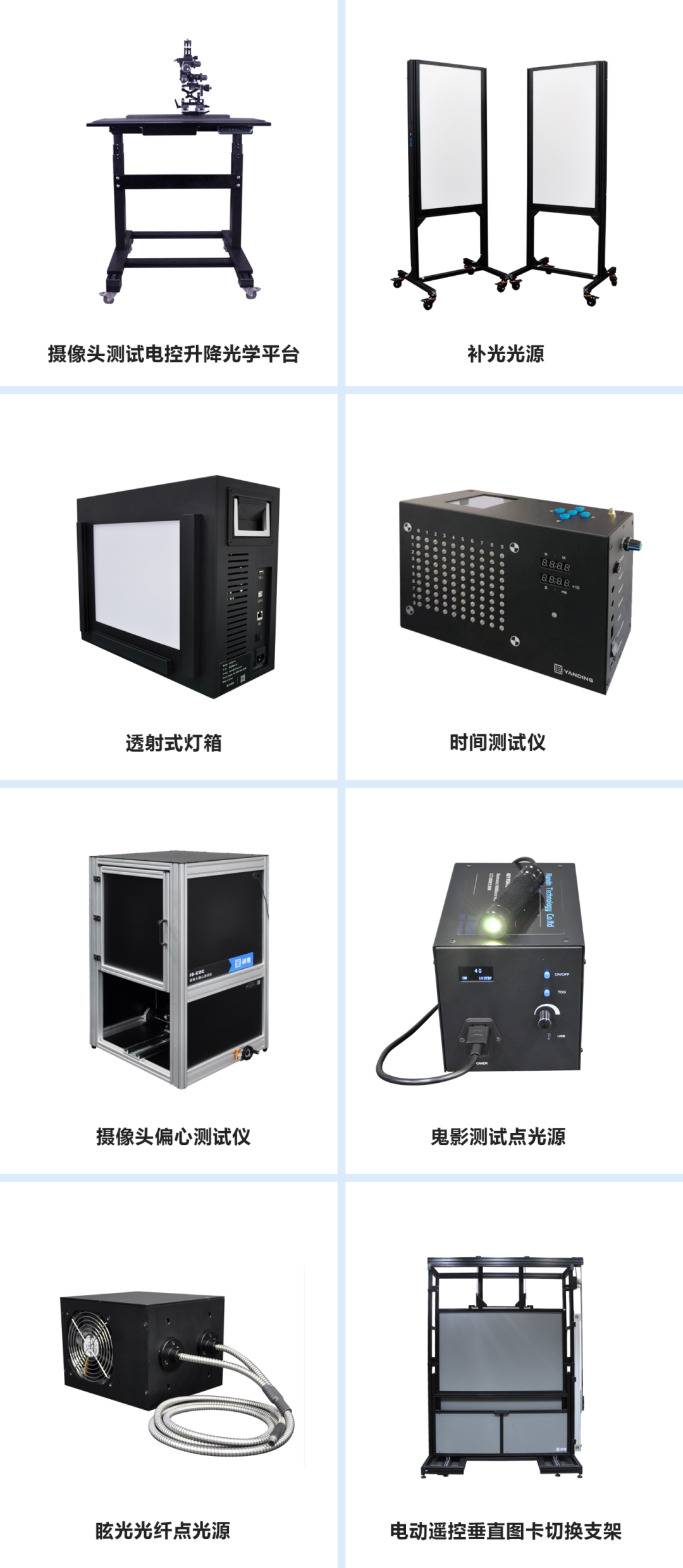
典型测试设备如下:
MTF的测试方法
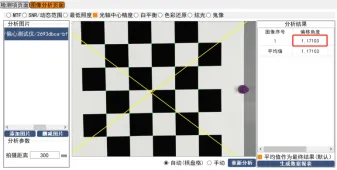
如果HFOV≥140°,使用斜棋盘格测试图卡进行测试,调节DUT与测试图卡之间的距离,使测试图卡中方格边缘的长度不得少于10像素;
b)调整DUT使中心视场测试图卡方格的边缘与其对应方向的夹角约5°;
c)调整DUT使其光轴正交于测试图卡平面,使用图像处理软件分析中心视场MTF5OP值;
d)可通过水平或垂直旋转DUT,使被测测试图卡方格处于70%视场处,测试图卡方格边缘的长度不得少于10像素;
e)使用图像处理软件分析70%场(左上、右上、左下、右下四个边角)的MTF5OP值。
如果HFOV≥140°,使用斜边测试图卡进行测试,调整DUT使视场中测试图卡方格的边缘与其对应方向的夹角约5°;
b)通过图像处理软件分析中心视场和70%场(左上、右上、左下、右下四个边角)的MTF5OP值。
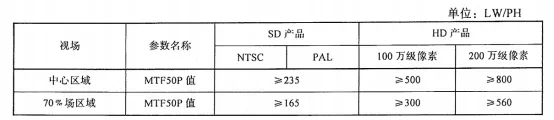
按QCT 1128标准的要求,产品水平或垂直方向的MTF值应符合下表的规定。
按QCT 1128标准的要求,产品水平或垂直方向的MTF值应符合下表的规定。
白平衡
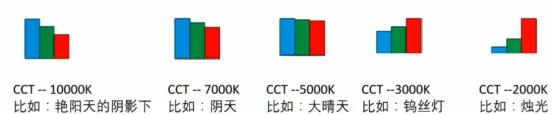
在解释白平衡之前,需要先了解另一个概念:色温,也称相关色温,CCT,是一种温度衡方法,通常用在物理和天文学领域,这个概念基于一个虚构的绝对黑体,绝对黑体从绝对零度(-273℃)开始加温后,黑体的颜色会逐渐由黑变红,转黄,发白,最后发出蓝色光,这种随温度而产生的颜色变化就光谱特性。
当加热到一定温度,黑体发出的光所含的光谱成分,就成为这一温度下的色温。色温用“K”(开尔文)表示。(理解:如果某光源发出的光,与某一温度下黑体发出的光所包含的光谱成分相同,就称为某K色温。如100W灯泡发出的光的颜色,与绝对黑体在2527℃时的颜色相同,那么这个灯泡发出的光的色温就是:(2527+273)K=2800K。使用这种方法标定的色温与普通大众所认为的“暖”和“冷”正好相反,例如,通常人们会感觉红色.橙色和黄色较暖,白色和蓝色较冷,而实际上红色的色温最低,然后逐步增加的是橙色、黄色、白色和蓝色,蓝色是最高的色温。
色温不仅可以影响我们的视觉感受,还可以影响我们的情绪和身体的生理反应。高色温的光线能提升注意力、增强活力、改善视觉体验和调整生物钟;中等色温和光线能舒缓情绪、增强温馨感和改善视觉舒适度;低色温的光线创造浪漫氛围、促进放松和增加舒适感。在不同的场合和需求下,选择合适的色温光源对于人们的生活和工作都具有重要意义。
下面我们来解释什么是白平衡(WB,white balance):照相摄像设备对于不同光源照明条件下的被拍摄物体所得到的影像还原应具有与人眼在相同照明条件下观察被拍摄物体相符合的色彩再现。
如下图白色在人眼中的表现为:

这就导致在利用自然光拍摄时,由于不同时间段光线的色温并不相同,因此拍摄出来的照片色彩也并不相同。例如,在晴朗的蓝天下拍摄时,由于光线的色温较高,因此照片偏冷色而如果在黄昏时拍摄时,由于光线的色温较低,因此照片偏暖色调 利用人工光线进行拍摄时,也会出现光源类型不同,拍摄出来的照片色调不同的情况。
那么是如何处理颜色的偏差呢?这就引出了白平衡这个概念,根据中国汽车行业标准QCT 1128《汽车用摄像头》,白平衡(White Balance)是指车载显示设备在不同光照环境下,通过调整红、绿、蓝(RGB)三原色的比例,确保白色显示准确且无色彩偏差的技术要求。其核心目的是保证显示屏在各种环境光线下(如日光、阴天、夜间等)均能呈现真实、一致的色彩,恢复图像的正常颜色,避免因色温差异导致的信息误读或视觉疲劳。
如下图,左边的图整体白平衡误差明显,且众多色块明显偏色,这种色彩响应对于消费电子行业的影像效果来说是不能接受的。
摄像头模组里的白平衡算法,通过调节摄像头的RGB通道的强度,补偿不同光源的色温差异(如暖光偏黄、冷光偏蓝),使白色在显示屏上呈现中性。或者通过配置的环境光传感器,实时检测外部光照条件,并自动调整白平衡参数,确保色彩一致性。
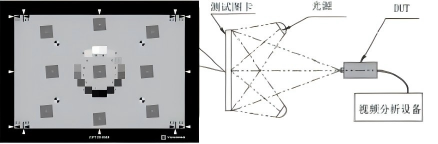
白平衡的测试,就是用不同色温的光源(800Lux,色温2800K、4000K、6500K)照射在马克贝斯24色彩色测试图卡上。要求图卡的中性色块不能有明显色差,图像不能产生偏色现象,24色彩色测试图卡第#21,#22两块(中间两块)灰度卡HSV中的色饱和度(S)值应小于15%。
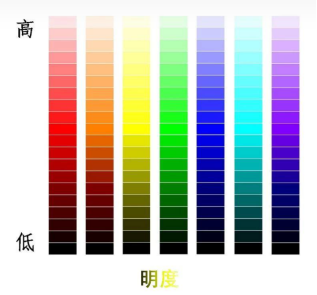
最后提下HSV参数,以及灰度卡对应HSV参数。
HSV(色相Hue、饱和度Saturation、明度Value)颜色空间是一种从人的视觉系统出发建立的颜色空间,常用于图像处理和计算机视觉中。
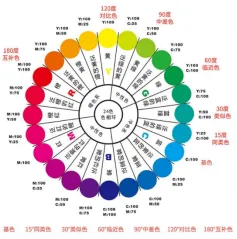
在HSV颜色空间中,色相H表示颜色的种类(如红色、绿色等);色相是色彩的首要特性,是区别各种不同颜色的最精确的标准。事实上任何黑白灰以外的颜色都有色相的属性。自然界中各个不同的色相是无限丰富的,如紫红、银灰、橙黄等。色相即各类色彩的相貌称谓。主要的色相有:三原色:红、黄、蓝;三间色:橙、绿、紫。色相环是一种非常有用的色彩理论模型,它把各种颜色按照一定的顺序排列在一个环形上,这样我们就能更好地理解和运用颜色之间的关系。
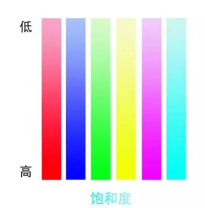
饱和度S表示颜色的纯度,即色彩的鲜艳程度,也称作纯度,表示颜色中混入灰色成分的比例。在色彩学中,饱和度越高,颜色越鲜艳,原色饱和度最高,随着饱和度降低,色彩变得暗淡直至成为无彩色(黑、白、灰),即失去色相的色彩。
明度V表示颜色的明亮程度。明度是色彩的明暗程度,反映光线反射或发射的强弱,由光线强度决定。明度越高,颜色越接近白色;越低则越接近黑色。同一色相可通过调整亮度产生从深到浅的变化(如深红→粉红)。
灰度卡是一种用于校准显示器或打印设备的工具,其特点是所有颜色均为灰色调,没有彩色成分。因此,灰度卡的颜色在HSV空间中表现为色相H为0(或任意值,因为灰度与色相无关),饱和度S为0,明度V在0到1之间变化以表示不同的灰色调。
具体来说:
色相H:灰度卡的色相值为0或任意值,因为灰度与色相无关。
饱和度S:灰度卡的饱和度值为0,表示颜色完全不含彩色成分,只有灰度变化。
亮度V:灰度卡的亮度值在0到1之间变化,表示不同的灰色调。
因此,灰度卡在HSV颜色空间中的表示为H=0, S=0, V在0到1之间变化。
信噪比SNR测试
信噪比:视频信号的大小与噪声信息(无用信号)大小的比例,以dB为单位
SNR(dB)=20log10(Si/Ni)
式中:
Si:色块i的信号(平均像素亮度值)。
Ni:色块i的噪声值(像素亮度值的标准差)。
在视频信号中,信噪比是衡量视频质量的重要指标之一。信噪比越高,表示视频信号越清晰,噪声干扰越少,视频质量越好。反之,信噪比越低,视频信号中的噪声干扰越多,可能会影响视频的观看体验。
图像中的噪声是一些原始场景并未携带的内容,图像领域很多时候用瑕疵(artifacts)来表达其影响。通常来说,噪声是由随机过程造成的测量的统计偏差。在图像领域,噪声表现为图像中的瑕疵,看上去就像是覆盖在图像上的颗粒物。在一副图像内,噪声有不同的形式表现,降低图像质量。

上面两张对比图直观地展示了噪声对图像质量的影响
噪声是传输信号伴生的不规则信号扰动的副产物,它们会让想要获得的目标变模糊。因此在图像领域,理想的状态是:创造出强信号同时将伴随信号的噪声做到最小。但实际操作起来难度很大,特别是在低光照环境下,信号本身就已经很弱了。
测试SNR的方法为:
a)用D50面光源,按照ISO 15739:2013中5.4.3调节光源亮度,最终输出OECF卡的18%灰色块区域亮度数字化值应为110~130(推荐值为118)。背光亮度均匀性不小于90%,亮度的幅度变化不大于2%;
b)HFOV<140°的DUT选取各阶灰度块中心不小于64×64像素;HFOV≥140°的DUT选取各阶灰度块中心不小于45×45像素;
c)使用图像处理软件,根据ISO15739:2013附录B进行分析,获得所有色块SNR的总平均值作为测评值。
QCT 1128标准中的要求是:SD产品的SNR应不小于34.7dB;HD产品的SNR应不小于30dB。
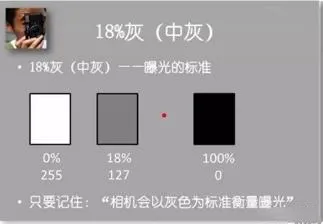
最后再解释是什么是18度灰。
18度灰是什么?我们的眼睛之所以能够看见物体,是因为光线照射到物体上,然后物体的反射光线进入了我们的眼睛,形成了“像”。不同的物体对光线的反射能力是不一样的,比如:纯白色的物体对光线的反射能力是98%、纯黑色的物体对光线的反射能力是0%。可能有人会想:极白对光线的反射能力是100%、极黑对光线的反射能力是0%,那么不是极黑也不是极白,那些我们平常看见的物体对光线的反射能力是不是50%?这个不是的,在很久以前科学家就通过科学研究发现,大自然中物体对光线的平均反射率为18%,也就是我们人眼平常看到的亮度。所以这个18%就被称为中间调,也就是18度灰。
我们人能够通过眼睛来判断画面的亮度,判断出画面是过亮还是过暗。但是相机不行啊,它只是个机型,它无法判断出画面是过亮了还是过暗了。所以我们就要给相机一个标准,告诉相机在这个标准内曝光是正常的,低于这个标准画面就偏暗,高于这个标准画面就偏亮。
刚刚给大家讲了大自然中的物体对光线的平均反射率为18%,也就是我们人眼看到的亮度。所以就把18度灰作为相机的标准,在这个标准内拍出来的照片曝光就是正常的,低于这个标准拍出来的照片就是曝光不足的,高于这个标准拍出来的照片就是曝光过度的。
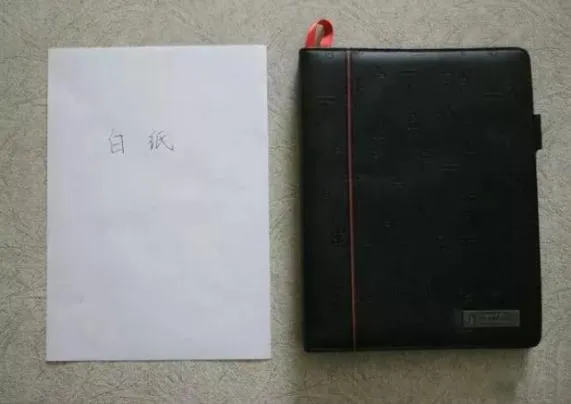
相机在拍摄时通过测光,测出画面的亮度,然后通过调整光圈、快门、感光度来拍出一张18度灰的照片,也即是一张不偏亮,不偏暗,曝光正常的照片。大家可以尝试一下,你拿你的相机拍摄纯白色物体,比如:白纸、拍摄纯黑色物体,比如:黑纸。你会发现无论是拍白色的纸还是拍黑色的纸,拍出来来的照片都是灰色的。
这是因为相机在拍摄纯白色的物体时,它会认为画面过曝了,所以会降低曝光,拍出来的照片就是灰色的。拍黑色的纸也是一样,相机会认为画面曝光不足,它会加曝光,拍出来的画面就是灰色。之所以拍成灰色,就是刚刚给大家说的18度灰,这是相机的标准,相机认为这样拍出来的照片才是曝光正常的。
拍摄纯白和纯黑的物体:
白纸拍出来是灰色:
黑纸拍出是灰色:
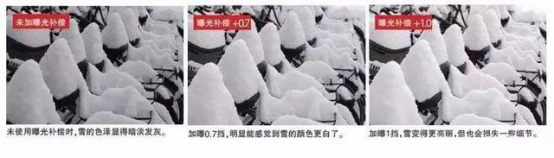
在拍摄绝大多数物体时,18度灰这个标准是没问题的,拍出来的照片曝光就是正常的。但是极端条件就不行,比如:拍摄雪景,画面都是雪白的,如果不调整曝光补偿拍出来的雪景就是灰蒙蒙的。在比如拍摄暗调人像,画面都是纯黑色的,如果不调整曝光补偿拍出来的暗调人像就是灰蒙蒙的。
所以在拍摄雪景时要适当加一点曝光,拍出来的雪景就是雪白的:
所以在拍摄暗调的照片时,就要减少曝光,这样才能拍出纯黑色暗调照片:
这也就是大家常说的“白加黑减”。
动态范围Dynamic Range
动态范围(DR)是摄像设备能够记录的从最黑到最白之间的最大影调范围。动态范围越大说明拍摄的影像层次越分明。所有超出动态范围之外的曝光值都只能记录为黑或白。它实际上描述了摄像设备记录影像灰阶等级的能力,可用灰阶测试图卡的灰阶级数表达。
自然场景中从无月的暗夜到太阳直射的动态范围约为180dB,而普通的图像传感器由于势阱容量的限制,动态范围通常在70dB左右。
真实世界中同一场景中动态范围变化很大,我们称之为高动态范围(High Dynamic Range),相对的普通图片上的动态范围为低动态范围(Low Dynamic Range)。
相机的成像过程实际上就是真实世界的高动态范围到相片的低动态范围的映射(非线性)。
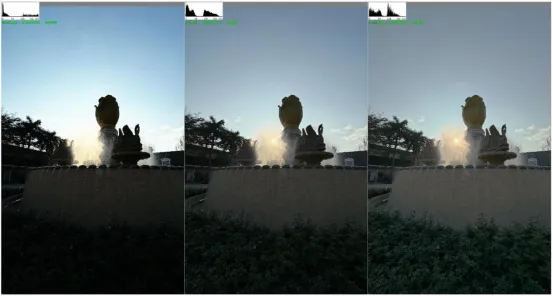
如下所示从左到右依次是低动态、原图、高动态的图。可见
(1)动态范围越广,高亮和阴影部分的细节展现越清晰,直方图像素分布越均衡;
(2)动态范围越窄,越容易出现高亮过曝和暗部死黑现象,高亮和阴影部分的细节几乎丢失,直方图上像素堆积在两端。
动态范围具体的测试方法是:
1)用D50面光源,按照ISO 15739:2013中5.4.3调节光源亮度,最终输出OECF卡的18%灰色块区域亮度数字化值为110~130(推荐值为118);背光亮度均匀性不小于90%,亮度的幅度变化不大于2%;
2)选取各阶灰度块中心不小于32×32像素;
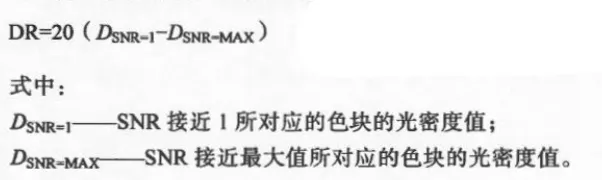
3)通过公式计算出动态范围值:
QCT 1128标准中的要求是:SD产品的动态范围应不小于60dB;HD产品的动态范围应不小于85dB。
动态范围测试布置图
色彩还原Color Rendition
色彩还原:将描述景物色彩空间坐标的图像数据映射为与输出相关的描述照片色彩空间坐标的图像数据。
注:色彩还原通常由一个或多个针对输入和输出观察条件的差别所进行的补偿构成,因此要将描绘景物颜色的尺度和色域映射在照片的动态范围和色域上,并使用偏好调整。简单地说即成像设备真实重现被摄物体颜色的能力,是影响图像质量的一个重要因素。
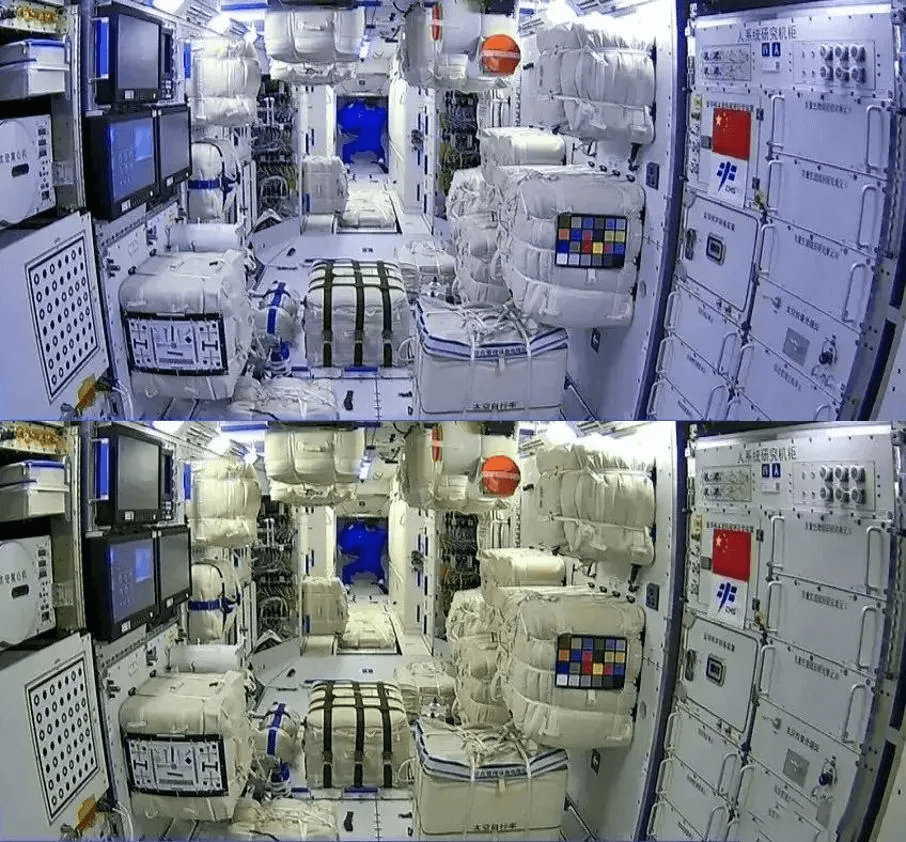
在央视的直播画面中,我们可以看到一张标准的24色标准色卡,如下图红色圆圈中所示。这张色卡是用来实时矫正核心舱中摄像设备的色彩的。太空中的射线是时刻变化又不可控的,因此拍摄的照片颜色通常也是失真的,这就需要标准的色卡来帮助我们将拍摄的画面矫正到真实的颜色。
如果不对摄像设备进行校色,那我们看到的直播画面将会如下图中的上部所示,整个画面明显偏蓝,色彩区分度很低,像在一个大冷库中,色彩明显失真。再看经过色卡矫正后的下图中的下图,色彩明显更有层次,设备是白色的,包裹是黄色的,宇航员的衣服是蓝色的,而不是像校色前的一片蓝。这就是色卡的神奇作用,而对摄像设备进行校色的过程,我们称为色彩还原。
从上面神舟十二号的例子中我们可以看到,通过24色卡进行色彩还原后的图像色彩更加真实,图像内容更加有层次感。换句话说,通过24色卡进行色彩还原后的色彩的区分度更高。而色彩还原度也是评价摄像设备图像质量优劣的一个重要指标。
色彩还原测试应在完成自动平衡之后进行,测试在D65光源、TL84光源和A光源照明条件下进行,测试图卡表面照度应分别为(800±80) lx、(200±20) lx、(25±2.5) lx;
调整DUT的取景,使测试图卡边缘与视场边缘重合;
通过视频分析设备,分析DUT拍摄各色块的色度坐标;
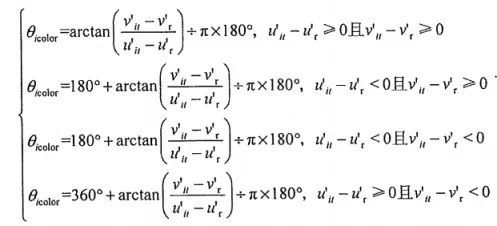
按下式计算图像中各色块(i=R,G,B,Ye)与白色块的色度角;
由下列公式计算图像中各色块(i=R,G,B,Ye)与白色块的欧几里得距离:
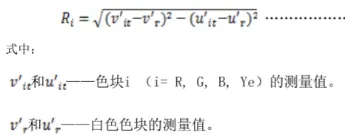
QCT 1128标准中的要求为:色彩还原基于CIE1976色度空间色调角。各色块与白色块的实测色度误差的欧几里得距离应不小于0.02。
其色调角应满足以下要求:
a)红色块的坐标应在(0°,44.8°)或(332.2°、360°)范围内;
b)绿色块的坐标应在(96.6°,179.9°)范围内;
c)蓝色块的坐标应在(209.9°,302.2°)范围内;
d)黄色块的坐标应在(44.8°,96.6°)范围内。
色彩还原测试布置图
最后提一下色度空间,CIE 1931 XYZ色彩空间(也叫做CIE 1931色彩空间)是最先采用数学方式来定义的色彩空间之一,它由国际照明委员(CIE)于1931年创立,这是基于心理、物理色而建立起来的表色系或混色系,是受心理因素的影响,即形成心理颜色视觉感受。这种表色法是测色学上,用实体的数值来度量和表达色泽的一种最科学和最精确的颜色表示方法,它使全世界在颜色的测量上有了统一的方法。人类眼睛 有对于短(S, 420-440nm)、中(M, 530-540nm)和长(L, 560-580nm)波长的光感受器,即视锥细胞,因此,根据三种视锥细胞的刺激比例,便能描述任一种颜色的感觉,此称为LMS空间。色彩空间指的是用一种客观的方式叙述颜色在人眼上的感觉,通常需要三色刺激值。更精确地说,首先先定义三种主要颜色(primary color),再利用颜色叠加模型,即可叙述各种颜色。CIE 1931色彩空间通常会给出颜色的三色刺激值,并以X、Y和Z来表示。需要注意的是,三种主要颜色未必需要是真正的颜色(也就是该种颜色无法真的被创造出来),X原色相当于饱和度比光谱红还要高的红紫,Y原色相当于饱和度比520毫微米的光谱绿还要高的绿,Z原色相当于饱和度比477毫微米的光谱蓝还要高的蓝。在三色加色法模型中,如果某一种颜色和另一种混合了不同分量的三种原色的颜色,均使人类看上去是相同的话,我们把这三种原色的分量称作该颜色的三色刺激值。这三个标准单色光可以通过光度学方法精确测定。
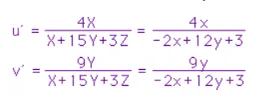
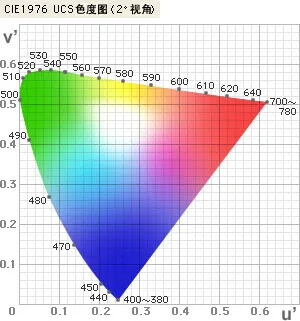
CIE1976色度空间全称CIE 1976(L*,u*,v*) (也作CIELUV)色彩空间,这个色度空间是为了改进之前的CIE 1931 XYZ色度图,使其在视觉上更均匀,也就是说颜色之间的差异更符合人眼的感知。L*表示物体亮度,u*和v*是色度,也称为色品坐标,用来表示颜色,由L*、u*和v*组成的三维坐标,形成了颜色的立体空间。对于一般的图像,u*和v*的取值范围为-100到+100,亮度为0到100。U’和 V’值可以按下列公式由三刺激值X、Y、Z算出。
色调角:表示颜色的色调方向,通过u'、v'坐标与白点的相对位置计算。
色距ΔC表示两个颜色在色度图中的直线距离,用于量化色度差异。在CIE 1976 UCS中,色距的计算直接基于u'和v'坐标的欧几里得距离。公式为
CIE1976UCS色度空间
炫光 glare
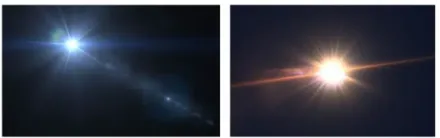
炫光是视野中由于不适宜的亮度分布,在空间或时间上存在极端的亮度对比,以致引起视觉不舒适和降低物体可见度的视觉条件。表现为视野中出现不适宜的亮度分布,在空间上存在极端的亮度对比,引起视觉不畅或降低物体的可见度。即,如果相机视野中的局部区域出现过高的亮度,会使得相机无法应对此强光的亮度。如果炫光区域布满整个视野,还可能带来图像对比度的整体降低。比如逆光拍摄的图片,由于强光直接摄入镜头,所造成的光源四周过于明亮,或有一圈光晕及雾化的现象。
炫光
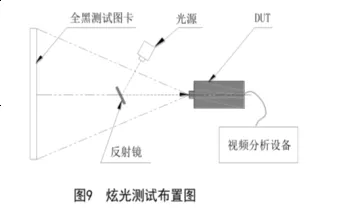
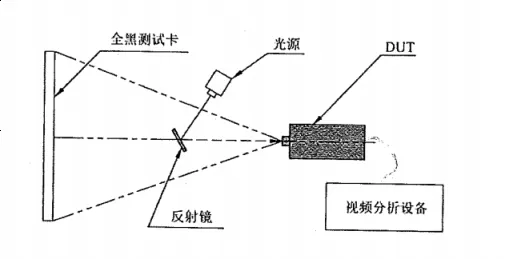
测试时,设置炫光点光源通过反射镜后入射到DUT视场内,调整光源的入射角度,使图像中光斑的面积最大,通过视频分析设备,计算信号强度大于图像中最大强度50%的区域所占面积,并计算该区域与整个图像面积的比值。
判定要求:镜头在试验光照射下的产生的光斑面积应不大于显示面积的25%。
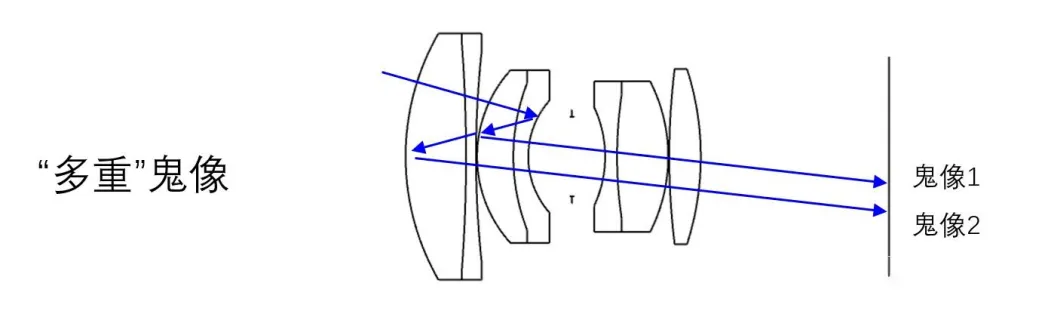
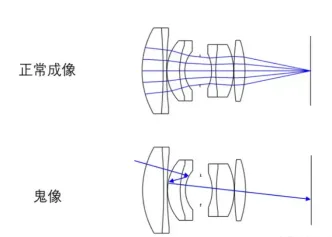
鬼像Ghost
环境中存在的高亮度目标源在镜头内部各个透镜间快速反射,最终在图像上形成的附加像,其亮度一般较暗,且与原像错开。由于任何两个镜片表面都可能发生这种现象(应该说都在发生,只是强度不同),两两组合可以产生很多光路,因此在这种情况下常常会形成一“串”光斑。
鬼像与视场的面积占比应满足以下要求:
a)若鬼像与原像的峰值亮度比值大于50%,鬼像与视场的面积占比应小于1%;
b)若鬼像与原像的峰值亮度比值大于30%且不大于50%,鬼像与视场的面积占比应不大于8%;
c)若鬼像与原像的峰值亮度比值不大于30%,鬼像与视场的面积占比不作要求。
测试时需将DUT在水平方向先顺时针旋转,再逆时针方向旋转,旋转中心为镜头的几何中心,保存各视场图像,再统计分析和计算各视场图像中的鬼像的面积占比和亮度比值,测试工作量比较大。
鬼像测试设备布置图
系统延时
系统延时,也称延迟时间,是指从摄像头采集图像到终端显示图像的时间间隔,反映了摄像头系统对于外界场景变化的响应速度,这个时间越短越好。如果自动驾驶的汽车对路况的感知处理存在较长时间的延迟,行车安全将受到巨大威胁。这个测试主要是为了保证摄像头系统在车辆驾驶过程中能够及时地反映出后方的情况,提高行车安全性。
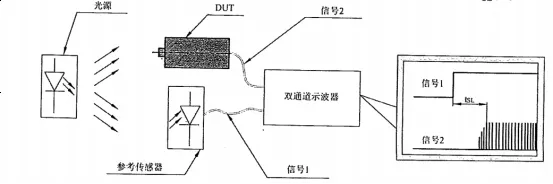
下图中信号1和信号2(DUT)的差异时间即为系统延时(图中的tSL),要求实测值应不大于100ms。
系统延时测试布置图
启动时间
启动时间是指从摄像头开始启动到能够正常工作所需的时间。快速启动可以显著提高工作效率。在需要实时监控或快速响应的应用场景中,如交通监控、门禁系统等,快速启动能够减少等待时间,确保监控系统能够及时捕捉到关键事件,从而提高整体的安全性和效率。而且,快速启动对于无线电池供电的摄像头尤为重要。这类摄像头通常采用锂电池或干电池供电,需要频繁充电或更换电池。快速启动技术如SmartAEC™(自动曝光控制、自动增益控制、自动白平衡)能够使摄像头在毫秒内完成启动和调整,从而减少能耗,延长续航时间。这对于需要长时间监控或无人值守的场景(如工业生产线、仓储物流)非常有利。
此外,快速启动技术还具有节能环保的优势。低功耗设计使得摄像头在工作时消耗的电能较少,降低了能源消耗和碳排放,符合环保要求,这对于环境保护和可持续发展具有重要意义。
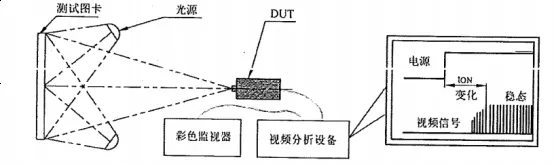
下图中DUT供电电压信号和稳态的视频输出信号之间的差异时间即为启动时间(图中的tON),要求实测值应不大于1s。
启动时间测试布置图
帧率 Frame Rate
帧率,单位时间产生完整图像的画面数。即单位时间对视频信号空间行的全部扫描数。帧率是衡量每秒显示画面数量的参数,直接影响视频、游戏等内容的流畅度。高帧率带来更顺滑的体验,低帧率则可能导致卡顿。
视觉暂留现象(Persistence of vision),即人眼在观察景物时,光信号传入大脑神经后,视觉形象不会立即消失,而是会残留约0.1-0.4秒。电影通过每秒播放24帧静态画面,利用视觉暂留效应使观众感知为连续动作。
QCT 1128标准中对帧率的要求如下表所示:
测试帧率需要使用时间测试仪,测试布置图如下图所示:
有效像素 Effective Pixel
像素(Pixel,是“Picture Element”的缩写,意为“图像元素”)是构成数字图像或屏幕显示的最小基本单位。通俗来说,它是一个带有颜色和亮度信息的微小方块,无数个这样的小方块按行列排列,就能组成我们看到的完整图像或屏幕画面。
有效像素,是电子影像传感器中能进行有效光电转换并输出影像信号的像素。有效像素是评估图像质量的核心指标。更高的有效像素意味着更大的图像尺寸和细节表现力。有效像素和像素的概念不同,像素是电子影像传感器中能单独感光的物理单元的总和,但其中的一部分像素被用来做辅助计算、补偿制造误差或边缘畸变或者因为技术限制而无法有效感光,所以有效像素是小于像素值的。
QCT 1128标准中对有效像素的要求如下表所示:图像信号应正常,不得出现信号丢失的现象。
测试有效像素比较简单:用DUT拍一张图片,然后用图像分析软件直接对图片分析即可。
视场角 Field Viewing Angle
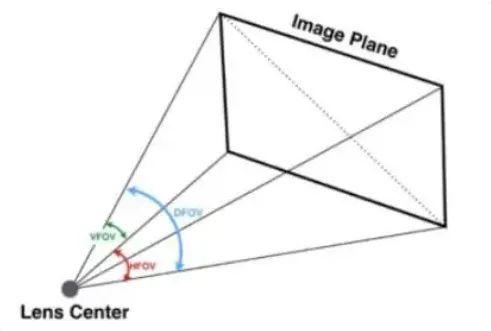
视场角,在摄像设备中,以摄像设备的镜头中心为顶点,被测目标的物像可通过镜头最大范围的两条边缘构成的夹角。视场角的大小决定了光学仪器的视野范围。一般来说,焦距越短,视场角越大,反之则越小;传感器尺寸越大,视场角越大。视场角分为水平视场角HFOV和垂直视场角VFOV。大视场角度适合需要广阔视野的场景,而小视场角度则更适合需要高倍率和精细观察的情况。
视场角的定义
QCT 1128标准中对产品的HF0V推荐为:(30~200)°;产品的VF0V推荐为:(20~160)°
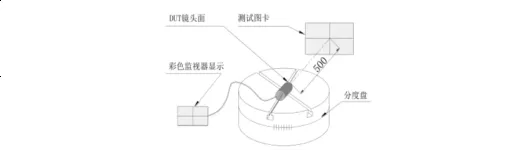
测试方法为:将DUT水平固定在分度盘中心,DUT镜头面与测试图卡的距离为500mm,镜头中心应与分度盘中心保持一致;转动分度盘使测试图卡竖标线出现在监视器显示界面的最左侧,读取转角值∠a,反向调节分度盘使测试图卡竖标线出现在监视器显示界面的最右侧,读转角值∠b,则∠b与∠a之差即HFOV;DUT旋转90°固定在转台中心,同理可测量出VFOV。
视场角测试布置图
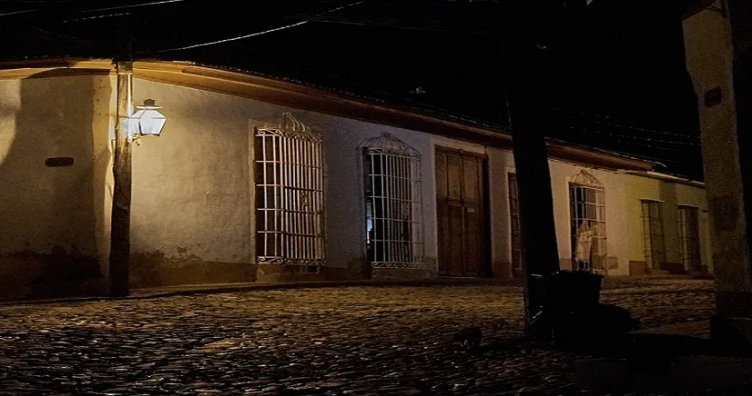
最高照度测试
摄像头最高照度测试用于评估摄像头在极端强光环境下的成像性能,确保其在高亮度场景中仍能清晰捕捉图像细节,避免过曝、光晕或色彩失真等问题。
测试方法是:保证被拍摄象表面的照度应不低于100000lx,一般使用透射式灯箱做为被拍摄物,然后用摄像头对其进行拍摄,再主观进行判定。要求图像应显示正常,无滚屏、花屏、水波纹、偏色、画面泛白等现象。
最低照度测试
最低照度也称为灵敏度,是摄像头对环境光线的敏感程度,或者说是摄像头正常成像时所需要的最暗光线。照度的单位是勒克斯(lux或lx),数值越小,表示需要的光线越少,摄像头也越灵敏。此测试在暗箱(室)中进行,DUT在照度为(2±0.2)lx的环境下,按照测试MTF值的测试方法进行测试,使用图像处理软件分析中心视场和70%场MTF值。要求MTF值应不低于下表中数值的60%,无干扰条纹、水波纹等现象。
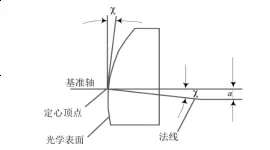
光轴中心精度optical axis center precision
光轴中心精度是指摄像设备的实际成像中心与光学成像理论中心的偏差。这一参数直接影响成像质量和对准精度,尤其在精密光学系统中至关重要。
光轴中心精度的定义
光轴中心精度是使用摄像头偏心测试仪来进行测试,测量测试图卡中心在图像中成像位置与DUT成像画面的物理中心的偏移量,再计算光轴偏移角度。QCT 1128标准中要求实测值应在(0±2)°范围内。
θ=arctan(Δɑ/f)(弧度)
θdeg=θ×180/π(度)
自动增益Automatic Gain Control
自动增益是放大电路的增益自动随信号强度而调整的自动控制方法。是用于根据环境光照条件自动调整视频放大器的增益,从而确保在不同光照条件下都能获得清晰的图像。增益是指对传感器捕捉到的信号进行放大的程度,增加增益会使图像看起来更亮,但同时也会增加图像的噪声,降低图像的信噪比。自动增益控制(AGC)电路能够根据环境光照的变化自动调整放大器的增益。在低亮度条件下,AGC会增加增益以获得清晰的图像;而在高亮度环境下,AGC会减少增益以避免信号过载和畸变。这种自动调节机制使得摄像头能够在较大的光照范围内正常工作,适应不同的环境光照条件。
测试方法为:安置好DUT,使其输出标准视频信号;在小于1s时间内迅速将(800±80) lx的D65光源切换为(2土0.2)1ux,切换完毕后开始计时,通过视频分析设备测量视频信号从变化到稳定的时间:间隔5s后在小于1s时间内迅速切换成(800±80) lx的D65光源,切换完毕后开始计时,通过视频分析设备测量视频信号从变化到稳定的时间。QCT 1128标准中要求不同光源切换后的响应时间应不大于1s。
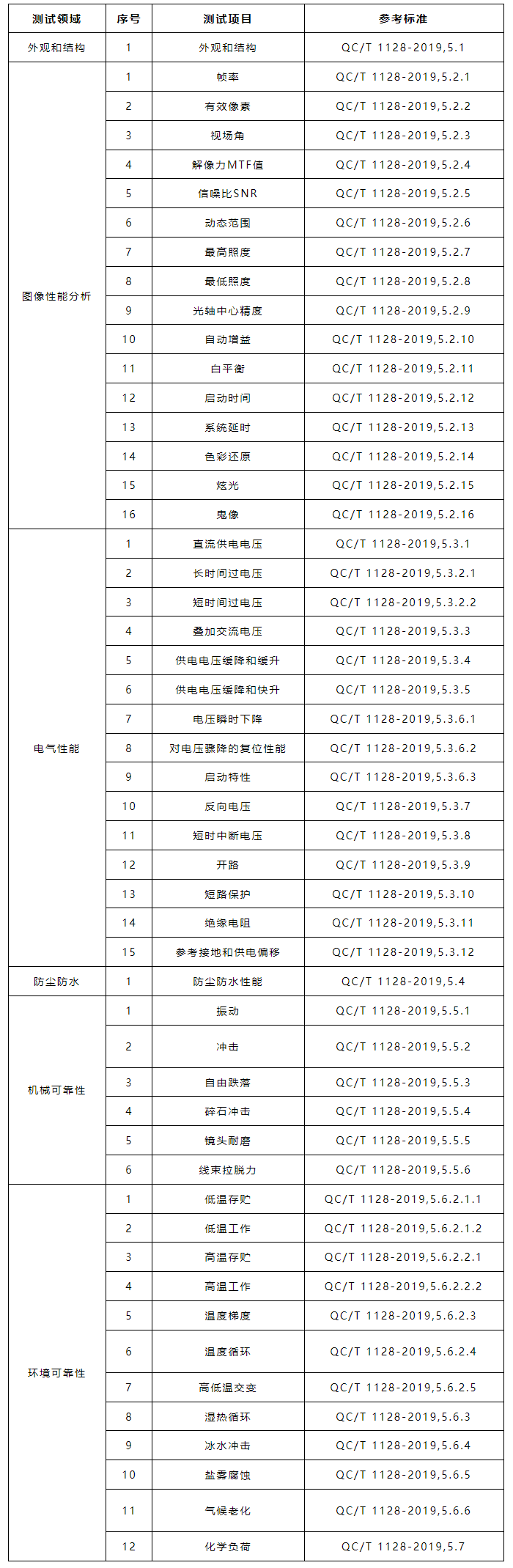
QCT1128测试项目












 微信公众号
微信公众号 微信咨询
微信咨询



 信息提交成功
信息提交成功